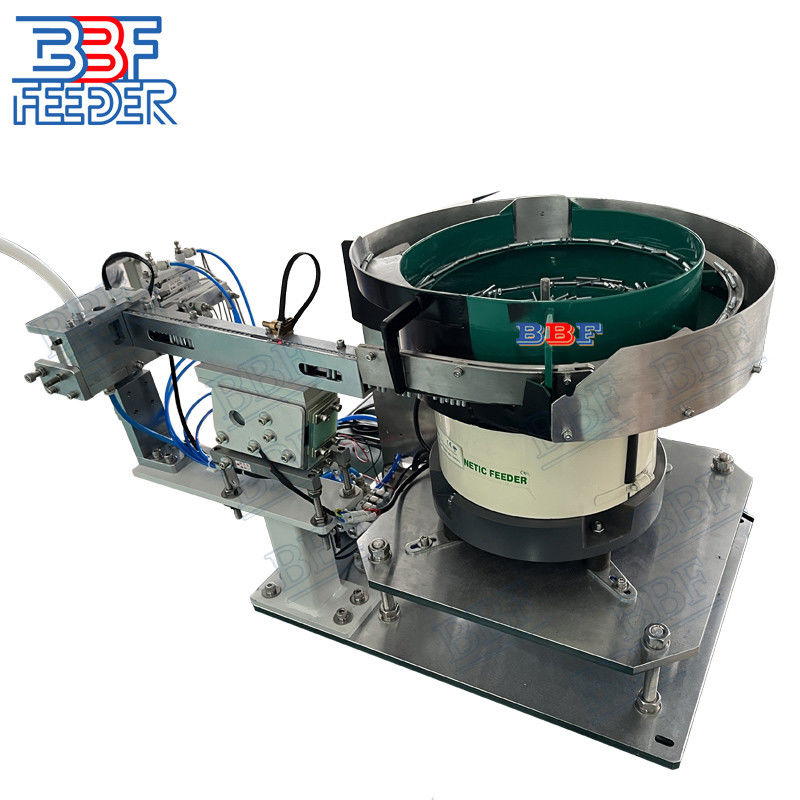
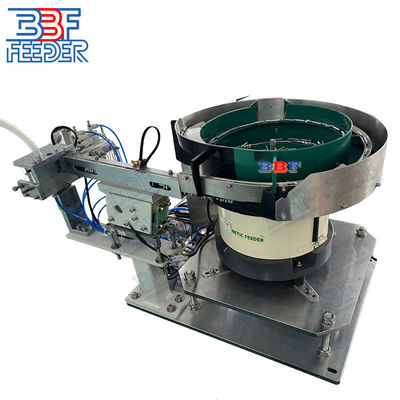
費用対効果の高い振動式ボウルフィッダー 螺栓 電磁振動式フィッディングマシン
1 記述:
振動式ボウルフィッダーは,部品の分類と方向付けのための信頼性と効率的な方法を提供する様々な産業で不可欠な部品です.この記事では,振動ボウルフィッダーを設計する上で重要なステップと考慮事項を調査します.
ステップ 1: 構成要素 を 理解 する
振動式ボウルフィッダの基本部品を理解することが重要です
ボウル:ステンレス 鋼 で 作ら れ た ボウル は,部品 を 置く場所 で あり,部品 を 導いて 方向 を 定める 螺旋 軌跡 や 複数の 軌跡 を 備わっ て い ます.
駆動装置: 駆動装置は電磁コイルとスプリングシステムで構成され,部品を動かすために必要な振動を生成する.
制御器: 制御器は振動の周波数と振幅を調節し,給餌プロセスを正確に制御します.
ステップ2 部品の特徴を特定する
効率 的 な 振動 型 鉢 給食 器 を 設計 する とき,給食 する 部品 の 特質 を 理解 する こと が 極めて 重要 です.以下 の 側面 を 考え て ください.
サイズと形状:不規則な形状やサイズのある部品は,適切な方向性のためにボウル設計で特別な考慮が必要かもしれません.
材料: 異なる材料は摩擦係数があり,振動に異なる反応を示し,これは部品のボウル内の移動と方向性に影響します.
重さ: 部品 の 重さ に よれ ば,必要 な 振動 力 が 決定 さ れ ます.重い 部品 は より 強力 な 動き が 必要 で,軽い 部品 は より 穏やかな 動き が 必要 です.
ステップ3: ボウル幾何学を選択
鉢 の 形状 は 設計 過程 に 極めて 重要 な 役割 を 果たし ます.以下 の 要因 を 考え て ください.
ボウル形とサイズ:最適な性能のために正しいボウル形とサイズを選択します.ボウルの形は,流通がスムーズで一貫しているように,供給される部品に準拠する必要があります.不効率な給餌や詰め込みを避けるために,部品の寸法との関係でボウルのサイズを考慮.
軌跡配置: 望ましい方向性と給餌速度に基づいて,ボウル内の軌跡の数と配置を決定する.
傾斜角: 鉢 の 傾斜 の 角度 は 部品 の 動き に 影響 し ます.より 急ぐ 供給 速度 に は より 急ぐ 傾斜 が 必要 と なり ます.
軌道の幅と深さ: 詰まりや詰まりを防ぐ一方で,部品のサイズに対応する寸法を選択します.
振動式 ボウル フィッダー の 設計 に は,部品,部品 の 特色,ボウル の 幾何学 を 慎重 に 考慮 する 必要 が あり ます.この 記事 で 紹介 さ れ た 基本 的 な ステップ に 従い,さらに加工または組み立てのために,分割と方向付けの部品のフィッダの有効性と効率を保証することができます.
2 仕様:
| 製品名 |
振動ボウルフィッダー |
| 材料 |
アルミ ((AL7075),不?? 鋼 ((SUS304) または顧客の要求に基づいて |
| コントローラー |
C.U.H. サンキー シンフォニア レオ アファグ |
| 電圧 |
220V 50HZ/110V 60Hz または顧客の要求に基づいて |
| パワー |
300W/500W/1000W/1500W/2000W |
|
物質特典
|
優れた加工特性,高強度,高硬さ |
| スピード |
顧客の要求に基づいて |
| 保証 |
2 年 |
| 認証 |
CE,ISO9001,ROHS |
| リード タイム |
3 週間の 仕事 |
3つ目効率的な振動ボウルフィッダー設計:
振動式ボウルフィッダーは,部品の分類と方向付けのために様々な産業で使用される重要な部品です.この 記事 は,振動 型 鉢 給食器 の 設計 に 関する 重要な 段階 を 概説 し,各 段階 に 関する 重要 な 考慮 点 を 強調 し て い ます.
ステップ 1: 構成要素 を 理解 する
基本部品を把握する: ボウル,駆動ユニット,コントローラ.
鉢は,部品を導いて方向付けするための軌道を備えた容器として機能します.
駆動装置は振動を生成し 制御装置は周波数と振幅を制御します
ステップ2 部品の特徴を特定する
部品 の サイズ,形状,材料,重量 を 考え て ください.
不規則な形は,特別な鉢設計の考慮を必要とする可能性があります.
摩擦係数と振動に対する部分反応は,動きと調整に影響します.
ステップ3: ボウル幾何学を選択
最適な形と大きさの鉢を選びます
円滑で一貫した流れのために,ボウルと部品を並べます.
道路の配置,傾斜角,寸法を特定し,渋滞を防ぐ.
ステップ4: ベースユニットの設計
ベースユニットには電磁コイルがあり 振動を生成します
適用要件に基づいて駆動ユニットタイプ (半波,フル波,高速) を考慮する.
適正なスプリングシステムを選択し,コイル力を均衡させ,安定した振動を確保します.
ステップ 5: 実施管理
制御システムは振動の頻度と振幅を制御します
異なる部品と供給要件に対する変数設定を保証する.
リアルタイム調整のためのフィードバックメカニズムを考えてください
ステップ6 テストと最適化
要求された仕様に対して 補給器の性能を徹底的にテストします
振動の設定や軌道の幾何学などの微調整パラメータ
ストレステストを行い,潜在的な問題を特定します.
振動式ボウルフィッダーを設計するには 部品の特徴を理解し 適切なボウル幾何学を選択し ベースユニットを設計し コントロールを導入しテストと最適化を行うこれらのステップを順守し,継続的な監視と保守を保証することで,特定のアプリケーションのニーズを満たす効率的で信頼性の高いフィッダを作成することができます.
4 もっと写真


 メッセージは20〜3,000文字にする必要があります。
メッセージは20〜3,000文字にする必要があります。 Japanese
Japanese